Netijeli BROBOT Akylly skid rul teker çalşyjy



Haryt maglumatlary
BROBOT teker işleýjisi, dürli pudaklara uly amatlylygy we peýdalary üpjün edýän täsirli we ygtybarly senagat enjamydyr. Onuň ýeňil dizaýny, gidrotehniki enjamlar, forkliftler, kiçi ýükleýjiler we başgalar ýaly dürli enjamlara ajaýyp gurnamaga mümkinçilik berýär. Onuň ýokary hilli materiallary we güýçli göterijilik ukyby önümiň uzak wagtlap ulanylmagyny we howpsuzlygyny üpjün edýär.
Bu önüm, tekerleri ýygnamak, işlemek we sökmek we ş.m. ýaly dürli iş şertleri üçin amatlydyr. BROBOT teker işleýjisiniň gysyş funksiýasy tekerleri ýygnamak wagtynda tekerleri aňsatlyk bilen saklaýar, durnukly saklanmagyny üpjün edýär we süýşmeginiň öňüni alýar. Işleýiş prosesinde onuň güýçli göterijilik ukyby tekerleriň howpsuz we ygtybarly daşalmagyny üpjün edýär we iş netijeliligini ýokarlandyrýar. Şol bir wagtyň özünde, tekerleri aýyrmak prosesinde önümiň aýlanyş funksiýasy we gapdal çalşygy funksiýasy sökmek we gurnamak işlerini ýerine ýetirmek üçin amatly bolan gysgyçyň ýagdaýyny çeýe sazlap biler.
Mundan başga-da, BROBOT teker işleýjisi hem ýokary çeýe bolup, dürli iş talaplaryna laýyklykda burçda we ýagdaýda sazlanyp bilner. “Swivel” funksiýasy operatora armaturany iň oňat iş burçuna sazlamaga mümkinçilik berýär, bu bolsa işlemegi ýeňilleşdirýär we iş netijeliligini ýokarlandyrýar. Berkidiji we gapdal üýtgetmek funksiýalary, tekeriň tekerini berk düzedip we has ýokary howpsuzlygy üpjün etmek üçin dürli tekerleriň ululygyna we görnüşine görä çeýe sazlanyp bilner.
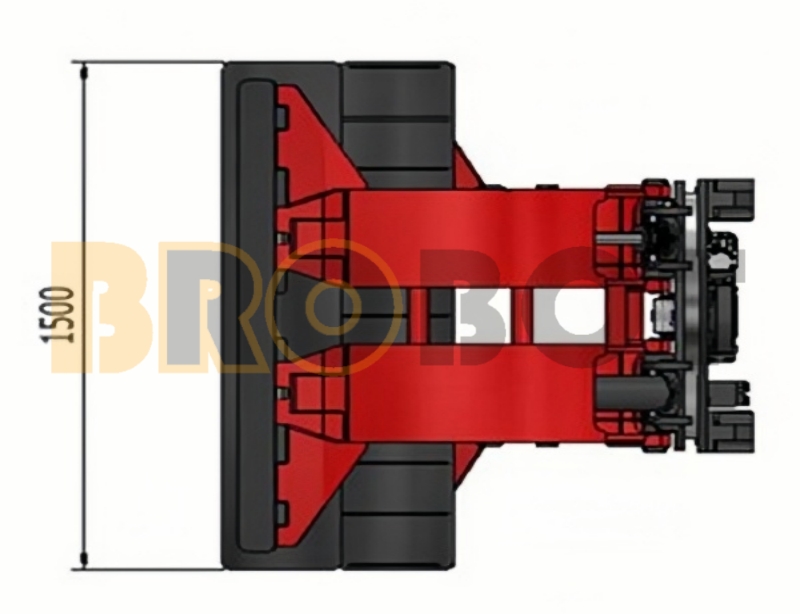
Önümiň parametri
| Görnüşi | Daşaýyş ukyby | predmetiň aýlanmagy | D | ISO | Gorizontal agyrlyk merkezi | Açmak aralygy | agramy |
| 15C-PTR-A002 | 1500/500 | 360 ° | 250-1300 | Ⅱ | 295 | 160 | 515 |
| 15C-PTR-A004 | 1500/500 | 360 ° | 350-1600 | Ⅱ | 300 | 160 | 551 |
| 15C-PTR-A001 | 2000/500 | 360 ° | 350-1600 | Ⅱ | 310 | 223 | 815 |
Bellik:
1. Forklift öndürijisinden forklift / goşmaçanyň hakyky ýüküni almagyňyzy haýyş edýäris
2. Forkliftler 2 sany goşmaça nebit zynjyryny üpjün etmeli, gapdal däl üýtgeýänler bolsa ýekeje goşmaça nebit zynjyryny üpjün etmeli.
3. Gurmak derejesi ulanyjynyň talaplaryna görä üýtgedilip bilner
4. Ulanyjynyň talaplaryna laýyklykda goşmaça çalt üýtgetme birikdirijileri goşup bolýar
Akym we basyş talaplary
| Model | Basyşyň bahasy | Akymyň bahasy | |
| Maksimum | Minieje | Maksieje | |
| 15C / 20C | 180 | 5 | 12 |
| 25C | 180 | 11 | 20 |
Önümiň görkezilmegi


Sorag-jogap
1.Brobot teker işleýjisi näme?
BROBOT teker işleýjisi ýükleýjiler, forkliftler, rul ýükleýjiler we beýleki enjamlar üçin gysgyç enjamy. Şinany ýygnamak, işlemek we sökmek ýaly meseleleri çözmek üçin döredilen ýeňil we ýokary güýçli.
2.BROBOT teker işleýjileriniň artykmaçlyklary näme?
BROBOT teker işleýjileriniň artykmaçlygy, ýokary güýji saklamak bilen pes agramydyr. Şinany berkitmek, işlemek we aýyrmak meselelerini talap edýän iş şertlerinde ökde.
3.BROBOT teker işleýjileriniň hyzmat möhleti näçe wagt?
BROBOT teker işleýjileri ýokary güýçliligi we ajaýyp berkligi bilen tanalýar we olary uzak möhletli ulanmak üçin amatly edýär.



