
Zawod 4t 6t 12t 16t 20t 25t 30t 35t 40t üçin Rotator bilen ekskawator Log Grapple aýlanýan agaç grapple agaç grabasy bilen üpjün etdi



Zawod bilen üpjün edilen “Excavator Log Grapple Rotating Wood Grapple Wood Grab” 4t 6t 12t 16t 20t 25t 30t 35t 40t üçin her ýyl bazara täze önümleri hödürleýäris we siziň bilen uzak möhletli kompaniýa gatnaşyklaryny gurmagy tüýs ýürekden umyt edýäris we siziň işiňizde iň gowy kompaniýamyzy ederis.
Gowulaşmagy nygtaýarys we her ýyl bazara täze harytlary hödürleýärisChina Wood Grable we Wood Grapple, Hemişe bolşy ýaly, “açyk we adalatly, paýlaşmak, artykmaçlyga ymtylmak we gymmatlyk döretmek” gymmatlyklaryna eýerýäris, “bitewilige we täsirli, söwda gönükdirilen, iň oňat ýol, iň oňat klapan” iş pelsepesine eýerýäris. Bütin dünýädäki adamlar bilen bilelikde täze işewürlik ugurlaryny, iň ýokary umumy gymmatlyklary ösdürmek üçin şahamçalarymyz we hyzmatdaşlarymyz bar. Tüýs ýürekden garşylaýarys we bap bilen bilelikde täze karýerany açyp, global çeşmelerde paýlaşýarys.
Esasy düşündiriş
Esasanam logistika pudagynda çalt we täsirli işlemek mümkinçilikleri hem örän möhümdir. Mundan başga-da, enjam dürli ýokary sesli işleýiş şertlerine hem uýgunlaşyp biler. Bu enjamyň ulanylmagy adam resurslarynyň çykdajylaryny azaldyp, önümçiligiň netijeliligini ýokarlandyryp biler. Enjamlary ulanmak hem aňsat, işlemek aňsat we daşamak üçin amatly. Ulanmak üçin hiç hili çäk ýok we işgärler ony öwrenmek üçin diňe az mukdarda okuw gerek, bu kärhanalary işe almak we taýýarlamak çykdajylaryny ep-esli azaldar. Umuman aýdanyňda, enjam köp kompaniýalara iş netijeliligini ýokarlandyrmaga we çykdajylary azaltmaga kömek edip biljek gaty amaly materialdyr.
Haryt maglumatlary
BROBOT agaç gysgyçlary aşakdaky aýratynlyklara eýedir: 1. Güýçli gurluş, ýokary hilli bölekler, ähli deşikler ýeň bilen ýaglanýar, uzak ömür. Boltlaryň hemmesi söndürilýär we ähli gurluş bölekleri ANSYS tarapyndan analiz edildi. 2. Iň pes we iň ýokary aralyk üçin optimal dizaýn. 3. Dyrnaklaryň optimal dizaýny we adamyň el gurluşynyň simulýasiýasy agaç üýşmesine girmegi aňsatlaşdyrýar. 4. Güýçli kompensasiýa goltugynyň sinhron goly sebäpli kepillendirilen howpsuzlyk. 5. Garaşylmadyk basyş düşen ýagdaýynda howpsuzlygy üpjün etmek üçin toplumlaýyn barlag klapan.
BROBOT agaç gysgyçlary ösen tehnologiýa bilen seresaplylyk bilen öndürilip, önümi ýokary hilli, berk we çydamly edýär we has täsirli we takyk iş üpjün etmek üçin iň az we iň ýokary tutma aralygyna ýetmek üçin ähli gurluş bölekleri takyk hasaplandy we optimallaşdyryldy.
Şol bir wagtyň özünde, önümde adam eliniň gurluşynyň simulýasiýasy bar, şonuň üçin gysgyçlaryň dyrnaklary agaç üýşmesine aňsatlyk bilen girip we awtomatiki usulda agajy tutup biler, bu bolsa işiň netijeliligini ep-esli ýokarlandyrar. Mundan başga-da, güýçli kompensasiýa çybygynyň sinhron goly iş wagtynda önümiň howpsuzlygyny üpjün edýär we basyş garaşylmadyk ýagdaýda aşak düşende integral barlag klapanyny awtomatiki usulda işjeňleşdirýär, bu bolsa işgärleriň howpsuzlygyny hasam üpjün edýär.
Mundan başga-da, BROBOT agaç gysgyçlary ýokary hilli böleklerden ýasalýar we ähli deşikler ýeňler bilen ýaglanýar, bu bolsa her böleginiň uzak ömrüni üpjün edýär we ýokary güýçli ulanyş gurşawyna çydap bilýär. Boltlaryň hemmesi söndürilýär we ähli gurluş düzüm bölekleri ANSYS tarapyndan durnuklylygyny we ýokary hilini üpjün etmek üçin seljerildi.
Umuman alanyňda, BROBOT agaç armaturasy ýokary iş netijeliligi bilen ýokary hilli, çydamly, ygtybarly we ygtybarly önümdir. Daş görnüşi, agaç ýygnamagyň we gaýtadan işlemegiň netijeliligini ep-esli ýokarlandyrýar, şonuň üçin bu siziň iň gowy saýlawyňyzdyr.
Önümiň parametri
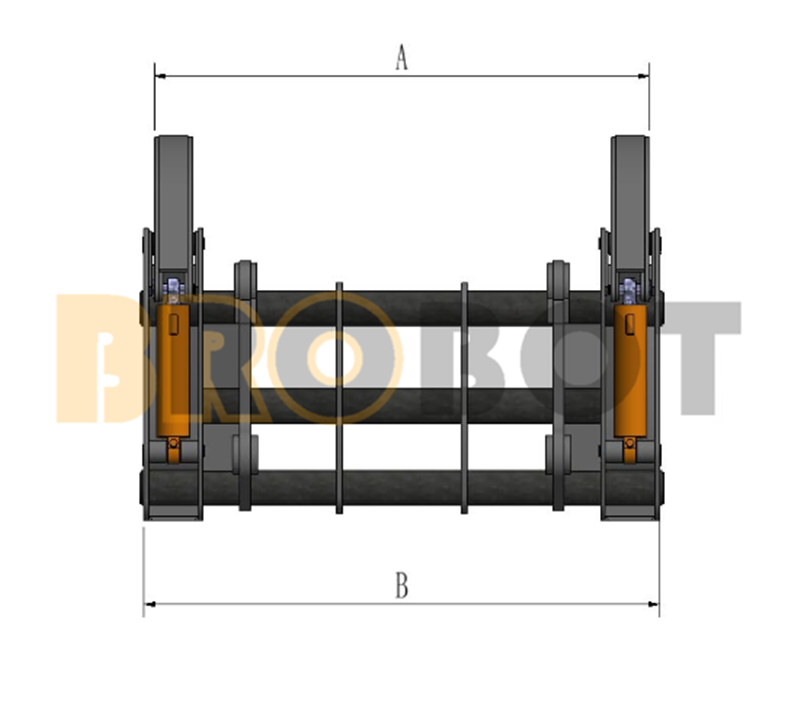
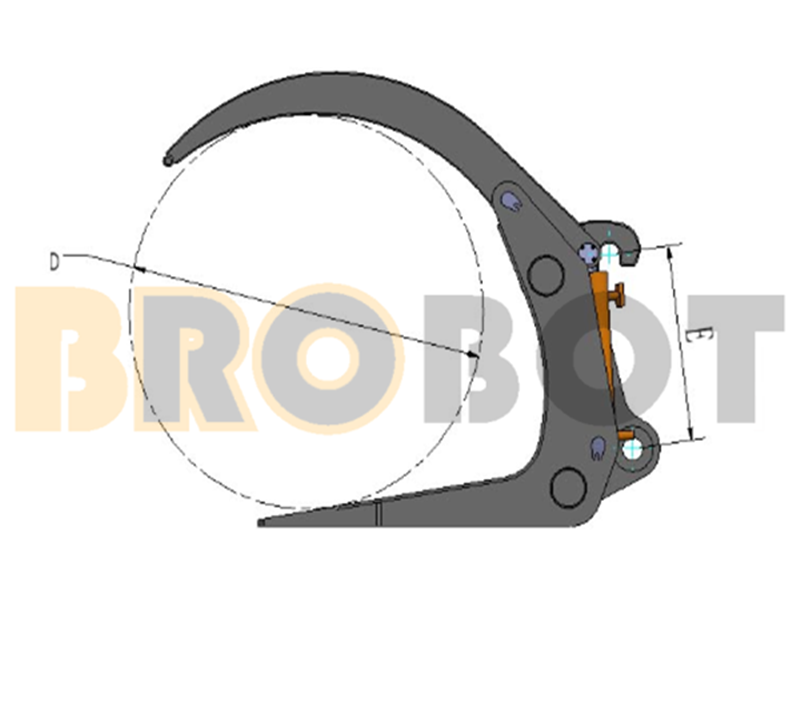
| Görnüşi | Agramy (kg) | D (mm) açmak | Ini B (mm) | Capacityük kuwwaty (kg) | Işleýiş agramy (t) | Maksimum basyş (Bar) | Nebit akymy (L / min) |
| DX1207 | 1000 | 1200 | 2000 | 5000 | 1.8 | 250 | 40-80 |
| DX2010 | 1800 | 1850-nji ýyl | 2600 | 8000 | 3 | 250 | 40-80 |
| DX2015 | 2235 | 2200 | 2800 | 12000 | 5 | 250 | 60-100 |
| DX2320 | 3000 | 2350 | 2800 | 20000 | 8 | 250 | 60-100 |
Bellik:
1. Ulanyjynyň talaplaryna görä 4 sany sazlama düzülip bilner we goşmaça baha goşular
2. Gural ulanyjy, solenoid klapan dolandyryşyny, goşmaça bahany düzüp biler
Önümiň görkezilmegi



Sorag-jogap
1. BROBOT Wood Grabber DX näme?
BROBOT Wood Grabber DX turba, agaç, polat, gant şugundyry we beýleki materiallary ele almak we daşamak üçin ulanylýan köpugurly maşyn. Loadükleýjiler, forkliftler, teleskopik forkliftler we beýleki enjamlar bilen sazlanyp bilner.
2. BROBOT Wood Grabber DX-iň artykmaçlyklary näme?
BROBOT Wood Grabber DX-iň berk gurluşy we uzak ömri üçin ýokary hilli komponentleri ýaly köp artykmaçlygy bar. Şeýle hem, iň az we iň ýokary tutma aralygy üçin optimallaşdyrylan dizaýna we taýaklara aňsatlyk bilen girip bilýän adam eliniň gurluşyny simulýasiýa edýän dyrnaklar bar. Mundan başga-da, onuň berk öwezini dolýan çybyk gollary sinhronlaýar we garaşylmadyk basyş düşse, integral barlag klapany howpsuzlygy üpjün edýär.
3. BROBOT Wood Grabber DX haýsy gaýtadan işleme şertlerini dolandyryp biler?
Köpugurly dizaýn we konfigurasiýa opsiýalarynyň kömegi bilen BROBOT Wood Grabber DX köp sanly iş şertlerini dolandyryp biler. Turbany, agaçdan, polatdan, gant şugundyryndan ýa-da beýleki materiallardan tutup almaly bolsaňyz, Wood Grabber DX ony dolandyryp biler.
4. BROBOT Wood Grabber DX çykdajylymy?
Hawa, BROBOT Wood Grabber DX henizem ýokary öndürijilik bilen üpjün etmek bilen tygşytly bolmak üçin döredildi. Onuň berk gurluşygy we ýokary hilli bölekleri uzak ömri üpjün edýär, optimal dizaýny we adama meňzeş dyrnaklar materiallary netijeli dolandyrýar. Mundan başga-da, köpugurlylygy we dürli tehnika konfigurasiýalary bilen utgaşyklygy ony islendik amal üçin gymmatly maýa goýýar.
5. BROBOT Wood Grabber DX analiz edildi we synag edildi?
Hawa, BROBOT Wood Grabber DX-iň ähli düzüm bölekleri optimal dizaýny we öndürijiligi üpjün etmek üçin ANSYS ulanyp seljerildi. Mundan başga-da, enjam uzak ömri üpjün etmek üçin gaty gaty boltlar we çalgy deşikleri bilen öndürilýär.
Zawod bilen üpjün edilen “Excavator Log Grapple Rotating Wood Grapple Wood Grab” 4t 6t 12t 16t 20t 25t 30t 35t 40t üçin her ýyl bazara täze önümleri hödürleýäris we siziň bilen uzak möhletli kompaniýa gatnaşyklaryny gurmagy tüýs ýürekden umyt edýäris we siziň işiňizde iň gowy kompaniýamyzy ederis.
Zawod China Wood Grab we Wood Grapple bilen üpjün etdi, Hemişe bäri “açyk we adalatly, paýlaşmak, artykmaçlyga ymtylmak we gymmatlyk döretmek” gymmatlyklaryna eýerýäris, “bitewilige we netijelilige, söwda gönükdirilen, iň oňat ýol, iň oňat klapan” iş pelsepesine eýerýäris. Bütin dünýädäki adamlar bilen bilelikde täze işewürlik ugurlaryny, iň ýokary umumy gymmatlyklary ösdürmek üçin şahamçalarymyz we hyzmatdaşlarymyz bar. Tüýs ýürekden garşylaýarys we bap bilen bilelikde täze karýerany açyp, global çeşmelerde paýlaşýarys.
Önüm kategoriýalary
-

Uly arzanladyş 20FT 40FT konteýner mehaniki sp ...
-

Gazon otlaýjylary öndüriji “Zero Turn Mower” kanuny ...
-

Zawodyň bahasy Oba hojalygy agaç nahallaryny oturtmak Ho ...
-

OEM / ODM Hytaý öz-özi hereket edýän ATV oturdylan gazon M ...
-

Amatly we täsirli Pagta Bale Handler
-

Gowy lomaý satyjylar opsiýa bilen agaç tutýan ...